Sam Schoedel

Hi! I work at Apptronik making robots move. I did my master’s at Carnegie Mellon with Zac Manchester. I did my undergrad in computer engineering at Virginia Tech, where I worked with Alexander Leonessa.
I’ve interned at ModalAI, HaptX, and JPL developing visual-inertial odometry algorithms, force-feedback robotic arms, and writing communication software for lunar rovers. I’ve spent the past few years developing high-speed model-predictive controllers as a member of the Robotic Exploration Lab.
Research
-
-
-
-
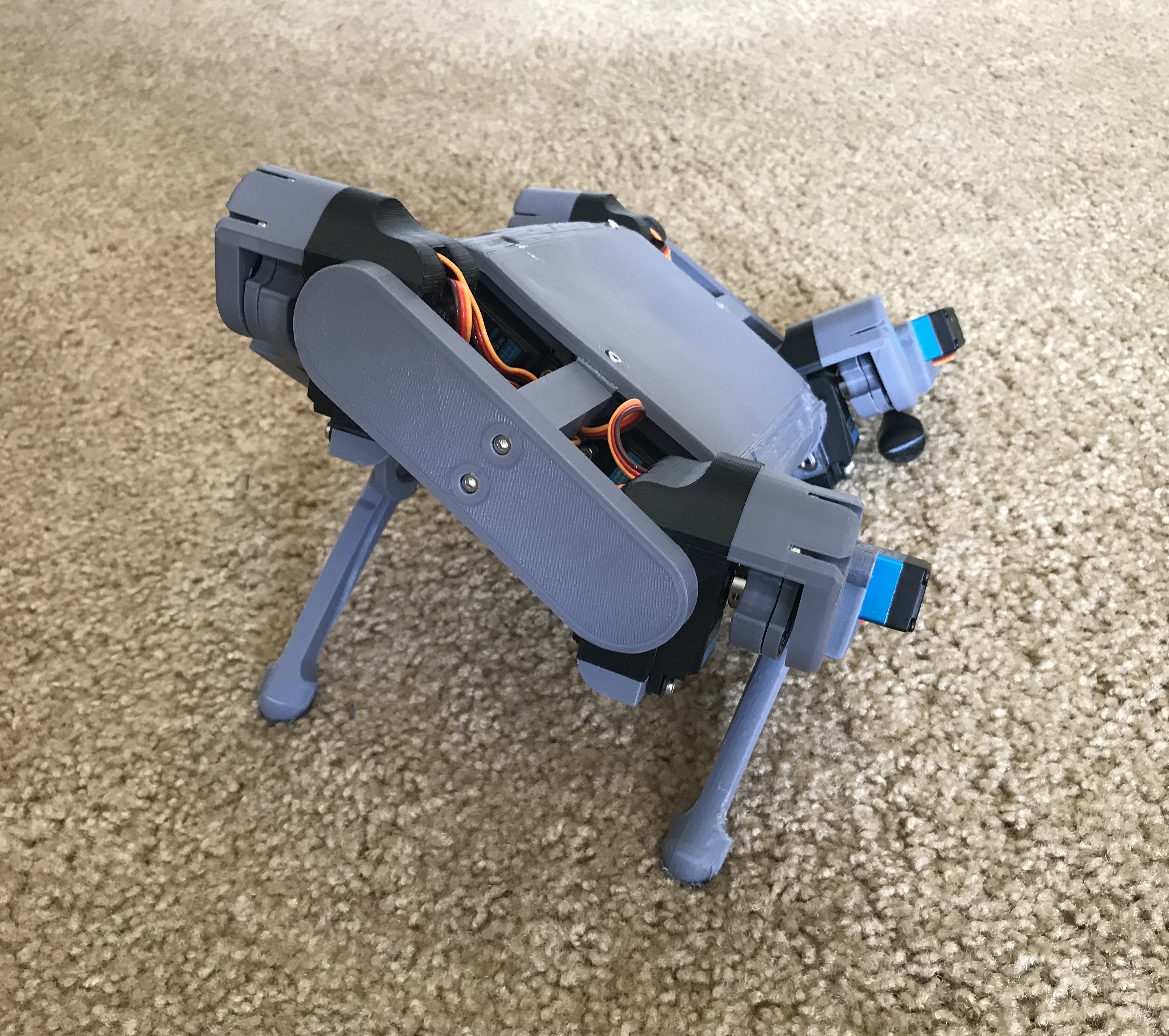 Development of an Affordable and Modular 3D Printed Quadruped RobotIn International Mechanical Engineering Congress and Exposition (IMECE), 2022
Development of an Affordable and Modular 3D Printed Quadruped RobotIn International Mechanical Engineering Congress and Exposition (IMECE), 2022



Projects
-
 Cart Pole
Cart PoleAn underactuated cart pole built from common 3D printer parts and a brushless motor. Built as a TA for 16-745, Optimal Control and Reinforcement Learning at CMU and used for various projects in the Robotic Exploration Lab.
-
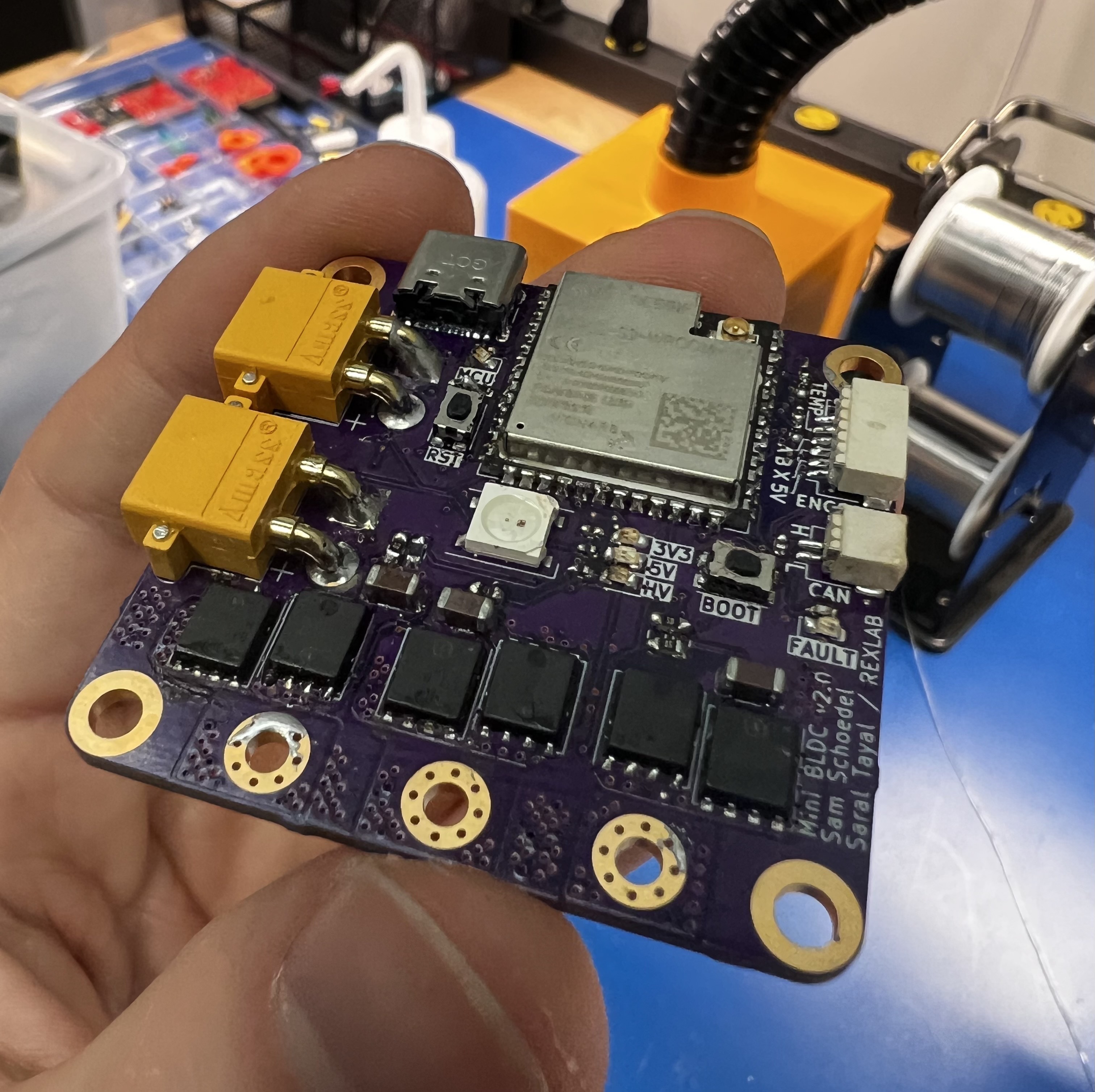 Brushless Motor Controller
Brushless Motor ControllerA compact and open source brushless DC motor controller with CAN support that runs an ESP32 microcontroller with a TMC6200 motor driver.


More projects coming soon